はじめに
前回は、赤外線センサーを接続してPLCの動作確認をしました。
今回は、もう少しだけラダーを紹介してみます。
多少の電気配線の知識と工具が使えれば、大抵の方はPLCの楽しさを味わっていただけると思います。
100Vの電源を使いますので、扱い方を間違えると甚大な被害を被る場合があります。
機器の取り扱いには充分注意しておこなってください。
電気工事士資格が不要な「軽微な工事」の範囲内でできる内容としているつもりですが、もしこれは「軽微な工事」の範囲を超えているのでは等ございましたらメールにてご指摘いただければと思います。
ラダー・ダイアグアム(LD言語)の超絶入門
論理積(AND)回路
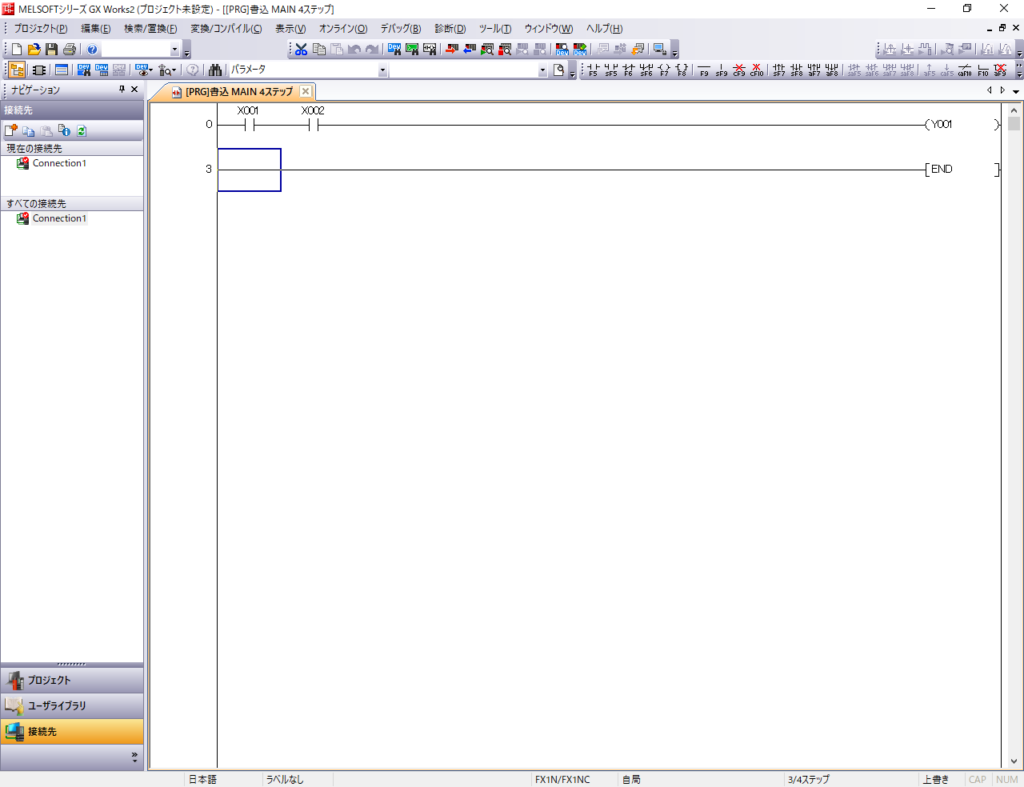
非常に簡単なラダーです。
センサー1とセンサー2のどちらもON(真:TRUE)のときに、出力ポイントY1のコイルを動作(リレースイッチを繋ぐ)させます。
論理和(OR)回路
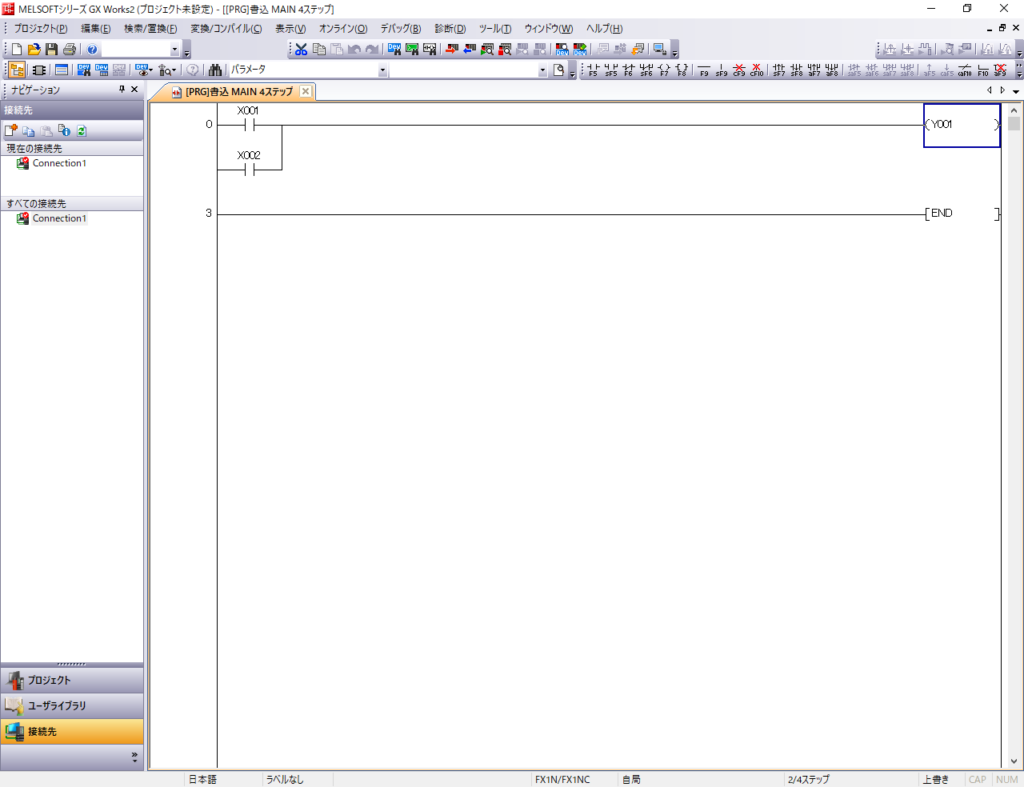
前回のセンサー間の物体を検出するときのラダーと同じです。
センサー1とセンサー2のどちらかがON(真:TRUE)のときに、出力ポイントY1のコイルを動作(リレースイッチを繋ぐ)させます。
自己保持回路
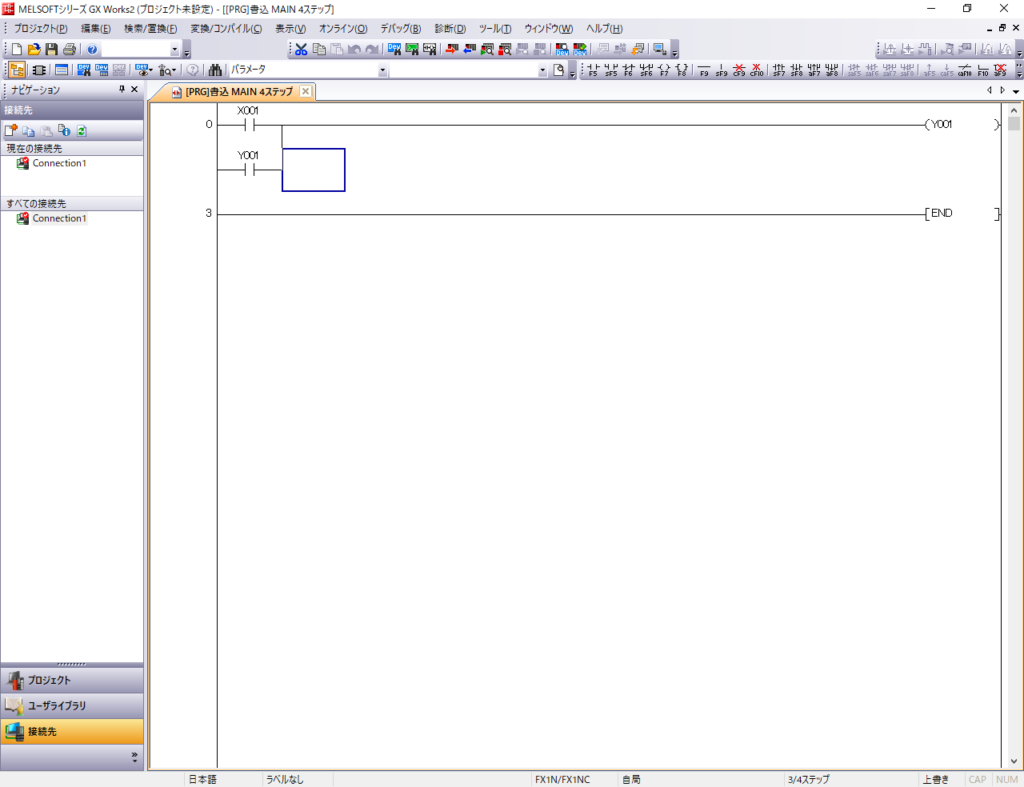
自己保持回路とは、1回の入力で出力し続ける回路です。
センサー1と出力ポイント(Y1)の論理和回路になっていますので、出力ポイントが一度動作すると、動作が保持されます。
自己保持回路にキャンセルスイッチをいれる
自己保持機能だけでは、出力ポイントが動作したままになります。
そこで、自己保持回路に停止(キャンセル)機能を作成します。
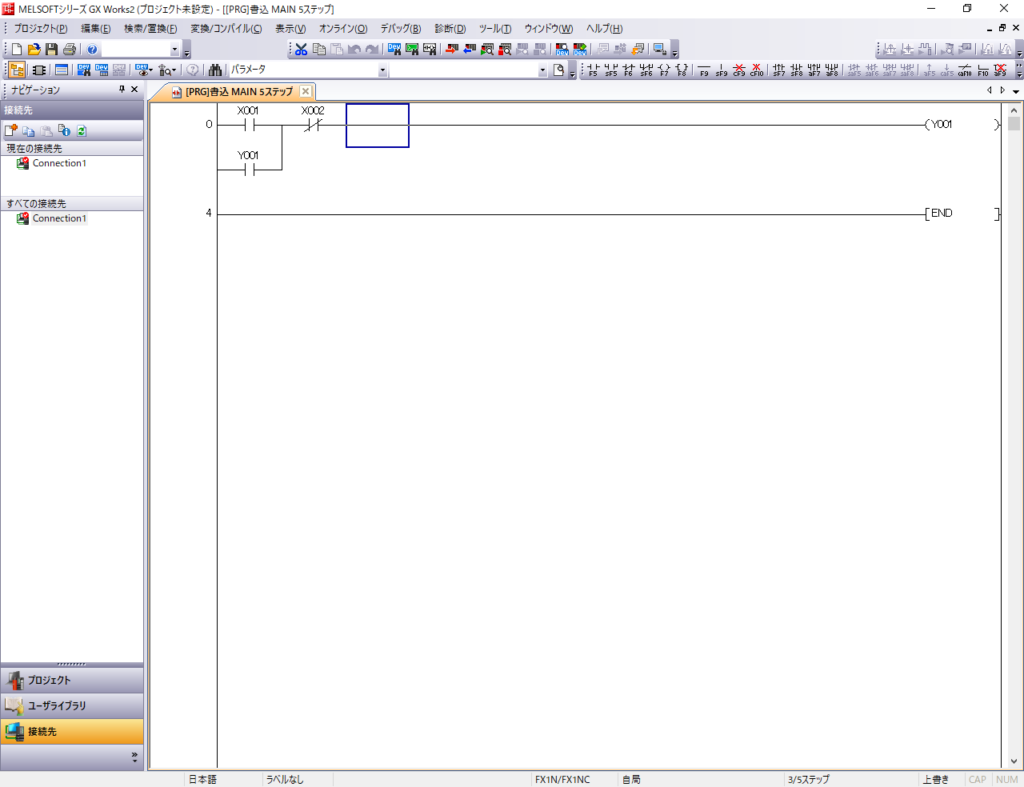
停止(キャンセル)スイッチとして入力ポイント(X2)を追加しています。
センサー1(X1)を1回ON(真:TRUE)にすると、出力ポイント(Y1)の動作が保持されます。
センサー2(X2)がON(真:TRUE)になると、出力ポイント(Y1)の保持された動作が停止(キャンセル)されます。
最後に
4回にわたった記事【PLC超入門】も今回で一応終了となります。
かけあしでPLCの表面をなでるだけで、ラダーについても本当に基礎中の基礎を紹介させていただきました。
また機会があれば、続編などもしてみたいと思いますが、歴史が古いだけに沢山の情報がネットに溢れていますので、そちらを参考にされるのが良策かと。
超入門ということで、とりあえず入門編への取っ掛かりにでもなればよいかとおもいます。
少しでも Programmable Logic Controller の意味がわかっていただけたら幸いです。