お客様から、外部トリガー付きUVCカメラを使ってラインの製品検査がしたいのだが、どうやって使えば良いのかわからない。とのご相談をいただきまして、こんな風に使えばできますよとの提案と試作を行いました。
お客様が購入されていた、UVCカメラが松電社のDN3V-30でした。
松電舎の30万画素 USB3.0カメラ DN3V-30はWindows対応、グローバルシャッターのCマウントカメラです。USB3 Vision準拠のCCDカメラ…
www.shodensha-inc.co.jp
お客様の取り扱う製品が、長尺でカメラの画角に収まらないので、単純に製品を撮影すれば良いものでもありません。
カメラの使用方法を直感的にご理解していただくために、Nゲージの鉄道模型を使います。
ラインに上下左右4台のカメラを配置して、製品の4面を撮影するとのことでしたが、デモでは左右と上の3面撮影にしました。
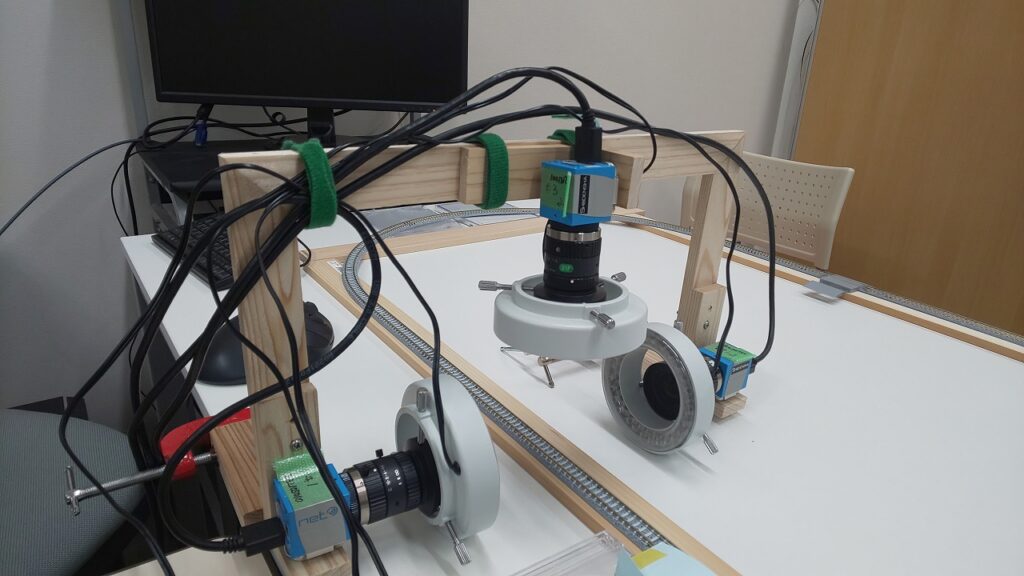
カメラのレンズから被写体までの距離を大体同じにして、木工にて簡単なカメラ用架台を作成しました。
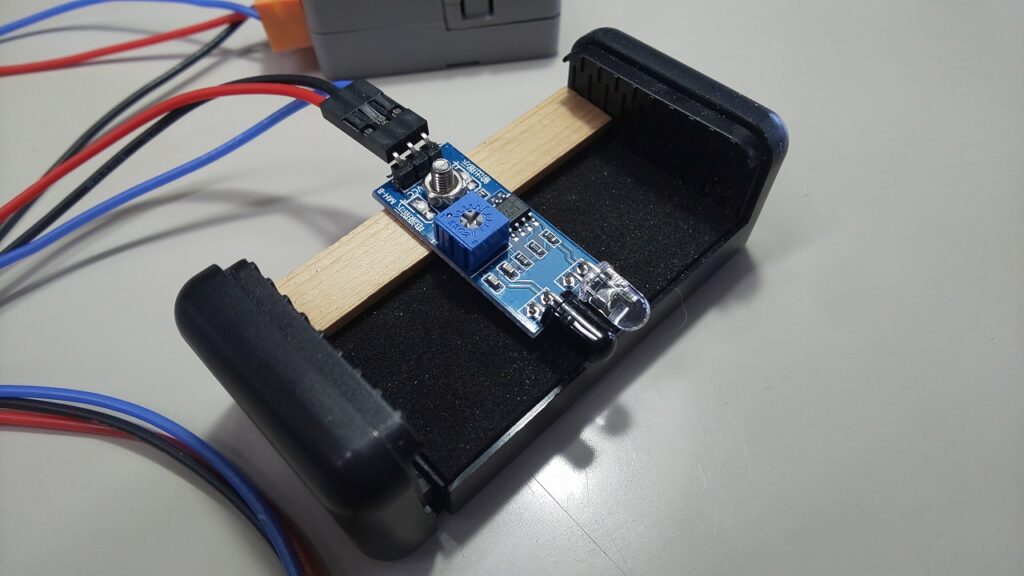
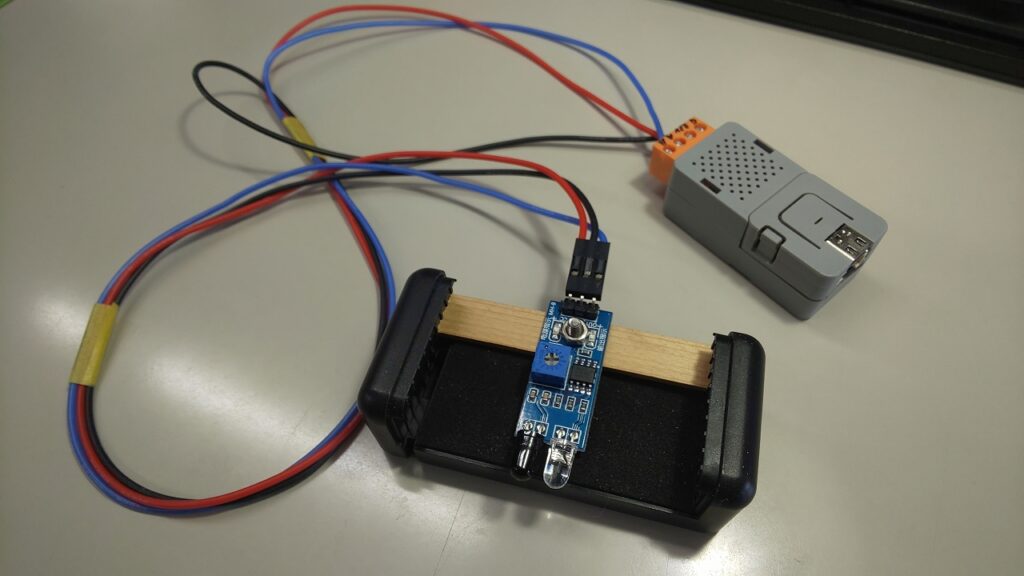
製品の通過センサーは、AmazonにてIR赤外線センサーモジュールを使いました。
センサーには、ESP32プロセッサーの乗ったM5STACK ATOM Liteを接続します。
カメラのトリガー端子に、ESP32からパルスを送っても良かったのですが、撮影タイミングをパラメータを使って簡単に触れるようにしたかったので、ESP32からUSBシリアル通信でパソコンに接続してパルスがきたタイミングで電文を送信します。
PCで電文を受信したら、PCに接続されたUSBへAPI経由で撮影トリガー命令を投げます。

センサー前を通過したら撮影を開始して、センサー前通過後撮影を停止します。
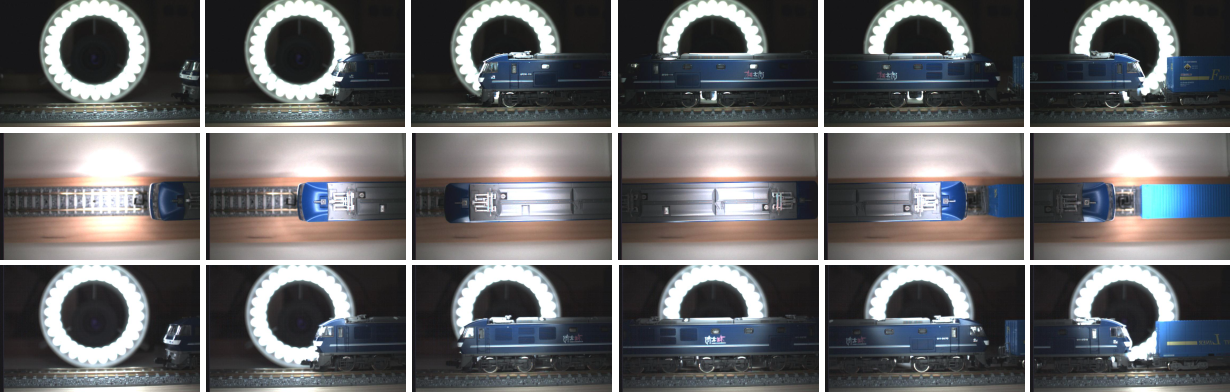
こんな感じで各カメラからの画像を取得します。
そいつを、パラメータに従って画像をつなぎ合わせます。



左右は進行方向を合わせるために、片方を左右逆転しています。
まだまだ精度をあげないと、実際のラインでは使えないですが、デモとしては成功ではないかと。